In this blog post
the author explains a couple of ways to choose uniformly a point from a triangle
and the first approach that he uses is via the barycentric coordinate:
given a triangle identified by the three points \(A\), \(B\) and \(C\)
Generate three random numbers \(\alpha\), \(\beta\) and \(\gamma\) using a uniform distribution from the interval \([0, 1]\)
Normalize the point in such a way that they have sum equal to 1
use \(\alpha A + \beta B + \gamma C\) as the chosen point
The resulting points are not actually uniformly distributed, fact
acknowledged by the author itself simply showing a plot of the distribution of the points,
my problem is that a plot is not a proof, so this post will try to fix that!
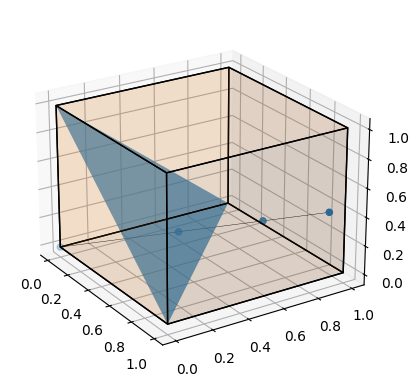
Let me start saying that geometrically, the choice of the three random numbers at step one
is the same as selecting one random point inside a unit cube.
Then the normalization at step two is the same as projecting the point into the 2-simplex
represented by the triangle with vertices of the cube with a single \(1\) in their
coordinates.
If we create a line connecting the origin to the selected point and we prolong it
until it reaches the boundary of the cube (i.e. a face or an edge)
we obtain all the points that identifies as the representative point on the simplex
and the length of such segment is not constant, explaining the reason of why
is not uniform.
(With this post I'm going to try embedding python in the actual page
using pyodide, marimo
and webassembly; click the button to activate the
two notebooks, but be aware that is going to load ~100MB of external
data; here a marimo notebook with similar calculations).
import marimo as mo
import random
import math
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
import numpy as np
slider = mo.ui.slider(-180, 180)
point = np.array([random.random() for _ in range(3)])
normalized = point/(point[0] + point[1] + point[2])
origin = np.array((0, 0, 0))
print(point)
# find the intersection with the cube
# find the two most high coordinates
indexes = np.argsort(point)[::-1]
print(indexes)
# the coordinate are given by t*point for a t such that one of the coordinate is 1
# t*w = 1 -> t = 1/w
t = 1/point[indexes[0]]
last = t*point
print(last)
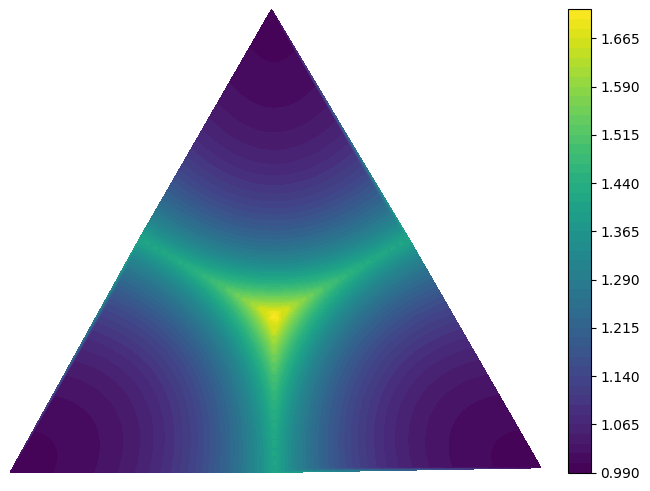
To calculate such length suppose we have the coordinate of the point
that is on the boundary, suppose that is the top face of the cube
with coordinate \(\left(\hat\lambda_1, \hat\lambda_2, 1\right)\)
this corresponds to a mapping to the normalized point on the simplex
the length of the segment is \(L(\hat\lambda_1, \hat\lambda_2) = \sqrt{1 + \hat\lambda^2_1 + \hat\lambda_2^2}\), (we are using the pythagorean theorem where
one side is the \(\lambda_3\) axis and the other is the segment from the corner of the cube to the point hitting the boundary).
We realize that \(\lambda_1 = \hat\lambda_1\lambda_3\), so that
we can rewrite the relationship in the following way
(it's fascinating how this mimics the projection of the complex plane into the sphere);
now if we rewrite
the length of the segment in the barycentric coordinates we obtain
$$
L_3(\lambda_1, \lambda_2, \lambda_3) = \sqrt{1 + {\lambda^2_1 + \lambda_2^2\over\lambda^2_3}}\,\hbox{when}\,\,\lambda_3 \gt {1\over3},\, \lambda_1\lt\lambda_3,\, \lambda_2\lt\lambda_3
$$
Now you can assume that the other three sections of the simplex have a functionally identical
formula, where you permutate the barycentric coordinates labels.
import marimo as mo
import random
import math
import matplotlib.pyplot as plt
from matplotlib import colormaps
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
import numpy as np
triangle = np.array([[0, 0], [1, 0], [1/2, np.sin(np.pi/3)], [0, 0]])
def rotate(xy, center, radians):
"""Use numpy to build a rotation matrix and take the dot product."""
c, s = np.cos(radians), np.sin(radians)
j = np.matrix([[c, s], [-s, c]])
m = j@(xy - center)
return np.array(m.ravel().T)[:,0] + center
def rotate_wrt_simplex_center(xy, radians):
center = b2p(1/3, 1/3, 1/3)
return rotate(xy, center, radians)
def b2p(alpha, beta, gamma):
return alpha*triangle[0] + beta*triangle[1] + gamma*triangle[2]
def value(alpha, beta, gamma):
return math.sqrt(1 + (alpha**2 + beta**2)/gamma**2)
def rotate_XY(xy):
rrr = lambda _:rotate_wrt_simplex_center(_, 2*np.pi/3)
return np.array(list(map(rrr, xy)))
# create a function otherwise too much pollution with variables
def weights():
"""Generate the data to plot a 3d visualization of the weights."""
# t1, t2, t3 don't have equal dimensions so we cannot create a tensor
# out of it, instead we are going to create a 2d array from the resulting
# 2d coordinates
xyz = []
# start with t1 equal to 1, so we loop over what we remove from it
for extra in range(100):
for t2 in range(0, extra):
t1 = (100 - extra)/100
t2 = t2/100
t3 = 1 - t1 - t2
if not (t3 > 1/3 and t1 <= t3 and t2 <= t3):
continue
p = b2p(t1, t2, t3)
v = value(t1, t2, t3)
xyz.append(np.append(p, v))
xyz = np.array(xyz)
return xyz
xyz = weights()
fig0, ax0 = plt.subplots(subplot_kw=dict(projection='3d'))
surf = ax0.scatter(*xyz.T, c=xyz[...,2], s=2, cmap=colormaps['plasma'])
XYZ = np.copy(xyz)
XYZ[...,0:2] = rotate_XY(XYZ[...,0:2])
surf = ax0.scatter(*XYZ.T, c=XYZ[...,2], s=2, cmap=colormaps['plasma'])
XYZ2 = np.copy(XYZ)
XYZ2[...,0:2] = rotate_XY(XYZ2[...,0:2])
surf = ax0.scatter(*XYZ2.T, c=XYZ2[...,2], s=2, cmap=colormaps['plasma'])
#plt.show()
mo.mpl.interactive(plt.gcf())
Comments
Comments powered by Disqus